

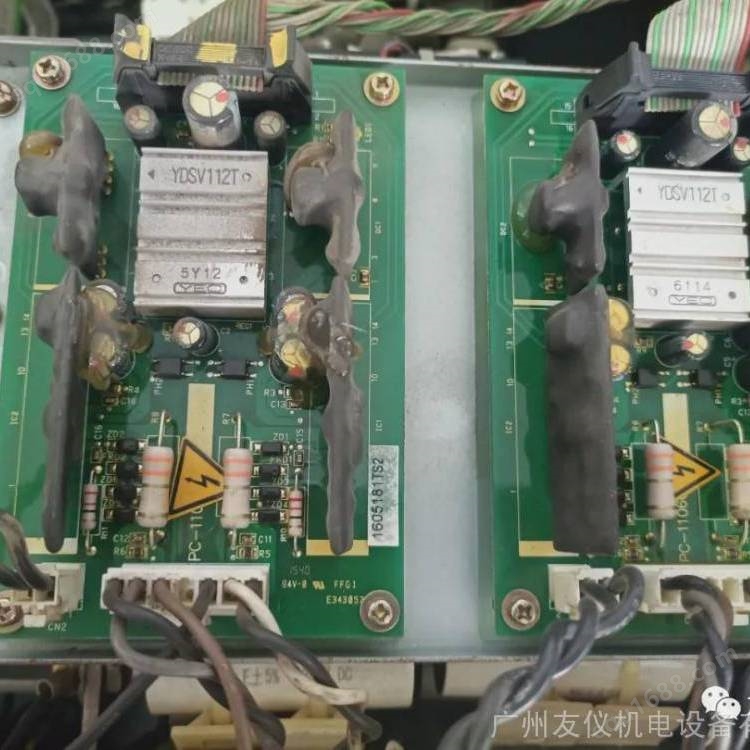







湖南武陵源M-900iA/260L手腕维修
发那科机器人减速机,因为需要从客户旧机器人拆卸配件更换到使用机器人上,一下过程是进行两次发那科J1轴减速机的更换步骤分为两大步:
一:拆解1、进行简易零点标定参照点的设定。(出货时全部轴都设定为0度。)2、把 表装在J1轴上,做好进行单轴零点标定的准备。3、将机器人移动到J3=-30º以下的姿势,切断控制装置的电源。4、拆除在机器人正面一边的螺栓(M16×60(2个))。5、再接通控制装置的电源,将机器人移动到能安全起吊的姿势。6、切断控制装置的电源。
、拆除J1轴电机。8、从安装在J1轴电机的孔,排出J1轴减速机的润滑脂。9、拆除通过一轴的本体电缆线。10、拆除J2机座安装螺栓(M16×60(9个)),吊机器人本体,从J1单元拆除机器人的本体。11、拆除中心齿轮。12、拆除J1轴减速机安装螺栓(M20×150(9个)),从J1机座上拆除J1轴减速机。
工业机械臂目前市场非常成熟,主要应用在车间焊接、组装、喷涂、抛磨、搬运等生产线上,精度高、负载大、速度快,以下列举常见工业机器人品牌:工业机器人四大家族:瑞士ABB、日本安川电机、日本Fanuc 、德国KUKA除了工业机器人四大家族外,还有很多工业机器人品牌国外品牌如:意大利柯马 、日本那智 越、日本爱普生、日本电装Denso、瑞士史陶比尔d等国外品牌如:沈阳新松、南京埃斯顿、安徽埃夫特、广州数控、上海新时达、南京熊猫电子、安徽配天等
湖南武陵源M-900iA/260L手腕维修
本文主要介绍一些常见协作机械臂,所谓协作机械臂就是人机协同工作,能够协同完成一件工作,不会伤害到人,与传统机械臂相比,体积小、灵活度高、易于安装,不需要加装防护栏,但是精度一般在0.1mm左右、负载10Kg内、速度大约1m/s,均要弱于传统机器人,但是为什么需要协作机械臂?1、传统工业机器人无法满足中小企业需求随着时代进步,目前生产的产品大多生命周期较短(1-2年),批量小且要求能够提供定制化服务,要求机器人能够随时更换产线并能够快速投入使用,传统工业机器人更换产线 高、安装周期长、不适合定制化服务,自然不能满足中小企业
、传统工业机器人必须要安装防护栏传统工业机器人因速度快、负载大,对人生命构成威胁,而协作机械臂都配备力矩传感,碰到人会降低速度甚至停止,对于需要人机协同工作的地方,比如3C行业,对柔性、触觉、精度高的地方由人负责完成,其他重复性的由机械手完成,可以降低人力 3、传统工业机器人安装 高传统机器人本身不算太贵,但是把机器人安装到工厂并正常运行却相当昂贵,主要有以下几个方面: 生产线的自动化改装,符合加工工艺的编程,外围设备的设计、安装,客户培训,售后维护等











所有评论仅代表网友意见,与本站立场无关。